武汉际上导航科技有限公司
商业服务
丨
注册资本:
1237.5万
丨
成立时间:
2015年01月


武汉际上导航科技有限公司成立于2015年,拥有完全自主知识产权,致力于应用卫星定位(GNSS)、惯性导航 (INS)、视觉定位 (VL)、激光雷达 (LIDAR)、同步制图定位 (SLAM)等专业技术,为各种目标提供空间状态和周围场景的感知信息。
际上导航是一家集软硬件研发、系统设计于一体,从事多传感器组合定位测姿系统、移动激光扫描系统、无人智能定位感知系统、智能驾驶高精度组合定位系统、道路实景信息采集系统、智能驾驶真值参考系统等研发、生产、销售、服务和培训的国家高新技术企业。
目前,公司产品已被广泛应用于国土资源、智能驾驶、机器人、智慧城市、电力、农林、水利、应急等诸多领域,市场覆盖国内30多个省份与海外100多个国家和地区。


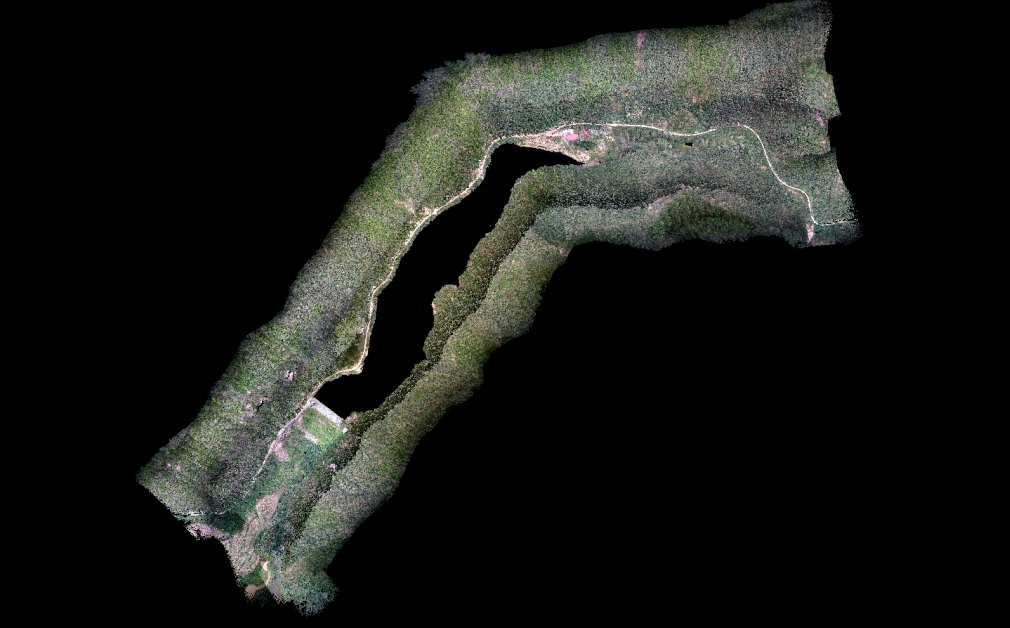
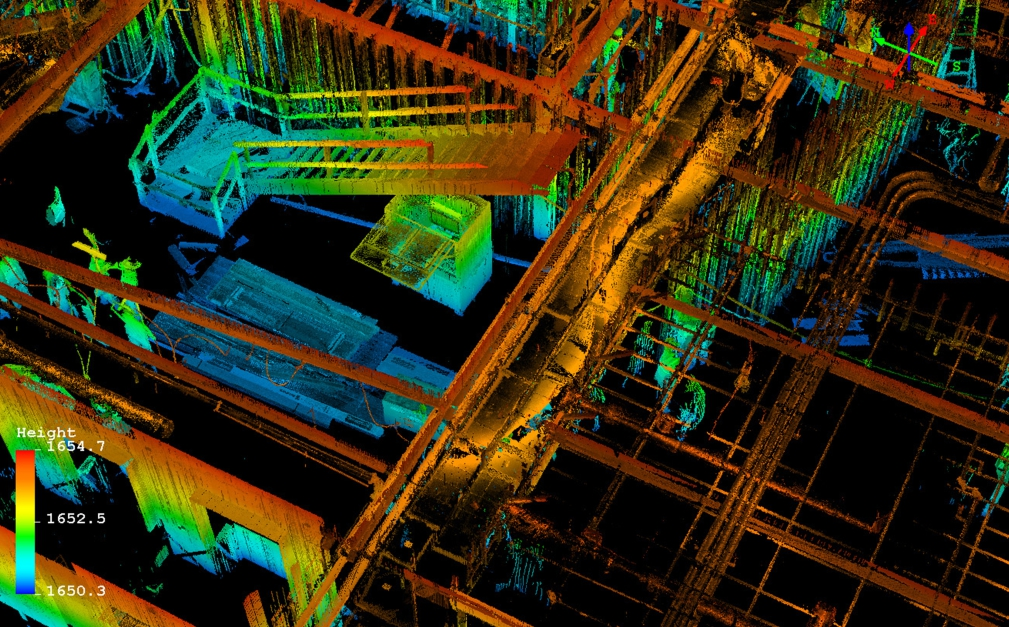
本系统集成了激光扫描仪、GNSS/INS定位测姿系统(POS)、相机及存储控制单元,可实时、动态、海量采集高精度点云数据和影像信息,满足宽广视场角、高精度高密度点云、丰富可见光、多光谱和高光谱影像等核心需求。可手持、车载、机载等,广泛应用于国土资源、智能驾驶、机器人、智慧城市、电力、农林、水利、应急等诸多领域。

道路实景信息采集系统,是一款集成了激光雷达、全景相机、GNSS/RTK、IMU、WS以及机器学习芯片的移动实景采集系统,可搭载于汽车上采集厘米级的高精度点云和全景数据,智能软件可以自主实现从路线优化校准、数据处理到提取成果等功能。gCollector道路实景信息采集系统自主智能简单易用、性能卓越,无人驾驶BEV模型可以轻松胜任城市实景三维、道路部件普查、高速公路、铁路复测等场景。

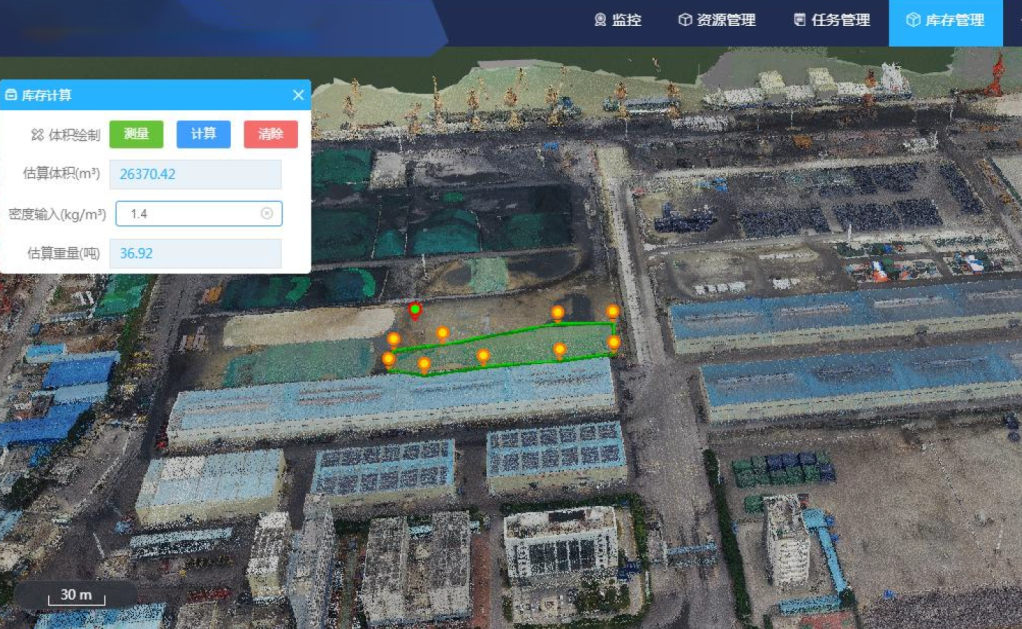
无人智能定位感知系统是无人车、机器人等无人智能体的关键组成部分,通过底层算法深度融合多源传感器(如卫星、惯性、激光雷达、摄像头、里程计等)数据,克服单一传感器的局限(如卫星信号丢失、惯性漂移、视觉受限等),确保无人智能体在复杂环境中实现高精度、高可靠、连续的位置、速度和姿态确定(定位),并同步理解周围环境(感知)。该系统利用融合策略和环境理解(如景象匹配、SLAM、障碍物识别)、AI优化数据处理,可实现自适应环境变化,为无人智能体的自主导航与决策执行提供坚实技术支撑,其核心目标是实现高精度(厘米级)定位、实时建模与智能避障。本系统已应用于自动驾驶、机器人、智慧港口、智慧矿山、智慧场站、智慧仓库和低空等领域。

真值测评系统gTruth是一套基于高精度多传感器硬件及后处理软件共同组成的可检验感知算法精度的系统,应用在智能驾驶行泊一体感知开发、自动驾驶公开道路测试验证等场景。通过高精度定位设备及局域网通信技术,实现被测目标和车身运动状态获取,如位置、速度、加速度等参数,提供真值参考系统。系统已用于多个量产项目,积累丰富评估经验,可提供定制服务。

高精度组合定位系统将高精度传感器信号,双频或三频多星座GNSS/RTK/PPP-RTK和底盘数据信息,通过安全完备的定位算法,即使在隧道和地下停车场等卫星信号不佳的场景,也能够提供低延迟位置、速度、姿态和授时(PVAT)的信息。典型应用场景包括HWP、TJA、AVP。

多传感器组合定位测姿系统,也就是POS系统,是由GNSS/INS等多传感器组成,通过GNSS/INS组合差分定位定向,提供流动站的瞬时位置、速度和姿态信息(俯仰、横滚、航向)。即使在恶劣的GNSS观测条件下如:城市峡谷、高架桥、隧道和树林等环境中,也可有效工作。
无人感知
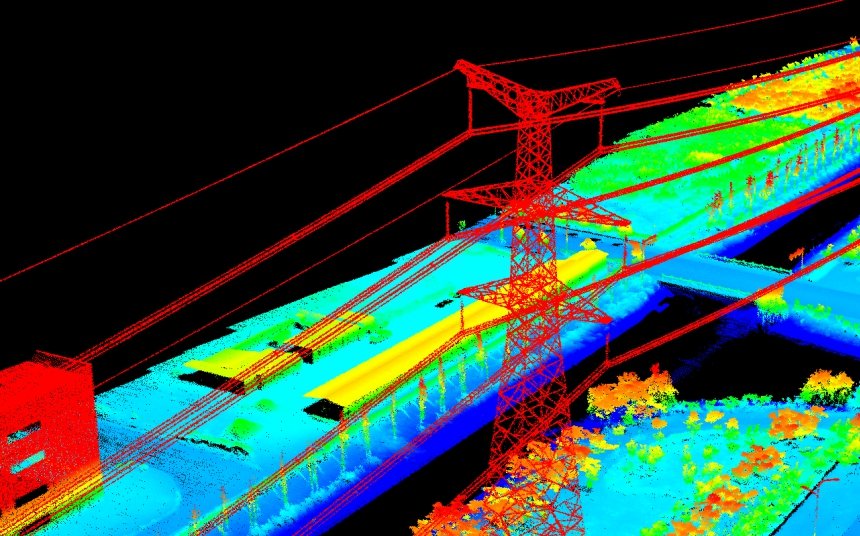
电力巡检
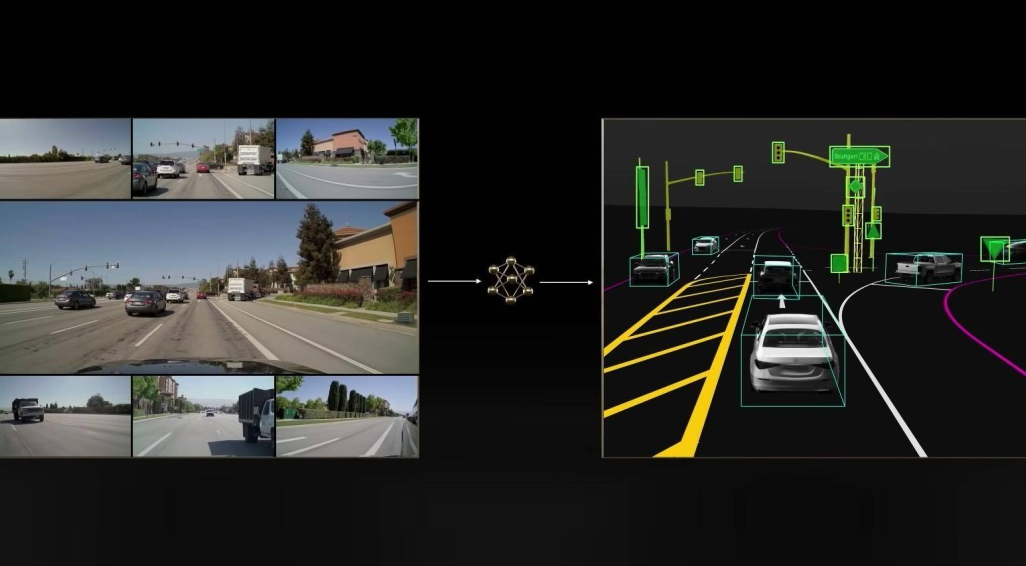
智能驾驶
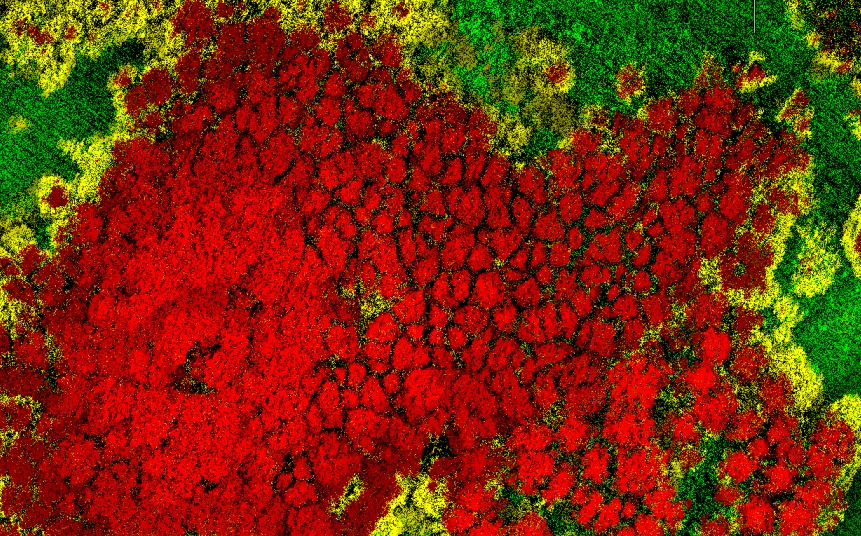
林业调查
水利应用
建筑测量
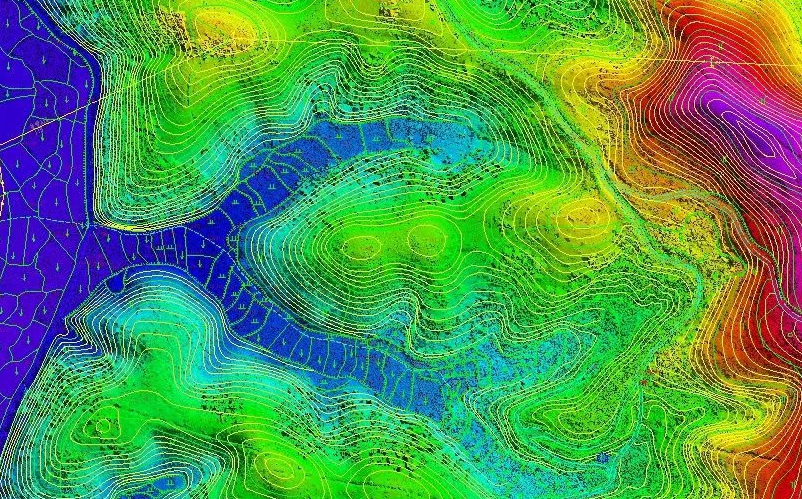
地形测绘
